
갠트리 로봇은 컬럼 프레임, X축 구성 요소, Y축 구성 요소, Z축 구성 요소, 고정 장치 및 제어 상자로 구성됩니다.
직사각형 X, Y, Z 3차원 좌표계를 기반으로 한 전자동 산업용 장비로 공작물의 위치를 조정하거나 공작물의 궤적 이동을 실현할 수 있습니다. 제어 코어는 산업용 컨트롤러를 통해 구현됩니다.
컨트롤러는 다양한 입력 신호를 분석 및 처리하고 논리적 판단을 내린 다음 각 출력 구성 요소에 실행 명령을 내려 X, Y 및 Z 축 간의 조인트 모션을 완료하고 완전 자동 작동 프로세스 세트를 실현합니다.
제품 조립 및 운반, 컨베이어 시스템, 무인작업장 등에 사용됩니다. 임시 보관 및 물류를 위한 중요한 주변 장비로 사용할 수 있으며 호스트 장비와 유연하게 매치하여 쉽게 사용할 수 있습니다. 관련된 응용 산업: 제품의 최종 조립, 하위 조립, 처리, 테스트, 디버깅 및 운송 등.
제품 특징은 고객이 다양한 유형의 자재 취급에서 효율성이 낮거나 취급 위험이 높은 문제를 해결하여 취급 위험을 편리하고 신속하게 줄이고 시간과 노력을 절약하며 노동력을 절약하고 노동력을 대체할 수 있도록 돕는 것입니다.
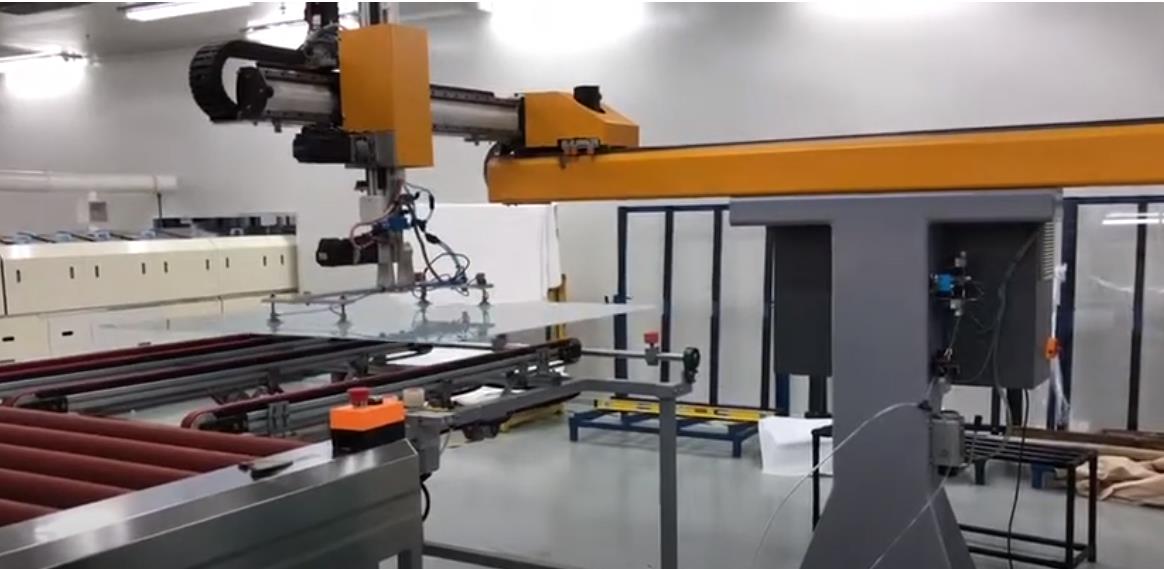
 이 유리용 갠트리 트러스 조작 장치는 기둥과 기둥에 설치된 가로빔을 포함합니다. 크로스빔은 슬라이드 레일과 함께 설치됩니다. 슬라이드 레일은 가로 슬라이딩 장치로 설치됩니다. 횡방향 슬라이딩 장치는 수직 슬라이딩 장치와 공압식 흡입 컵 장치로 설치됩니다. 운송 메커니즘은 3차원 공간의 고정된 지점에서 이동하고 흡입 컵을 통해 유리를 흡입하며 먼저 X축을 따라 측면으로 이동한 다음 지정된 위치로 90도 뒤집은 다음 위로 이동합니다. 그리고 Y축 아래로. 설정된 위치에 도달한 후 유리를 풀고 유리 선반에 놓습니다. 전체 장치의 구조적 안정성이 매우 높아 핸들링이 크게 향상됩니다. 능률.
이 유리용 갠트리 트러스 조작 장치는 기둥과 기둥에 설치된 가로빔을 포함합니다. 크로스빔은 슬라이드 레일과 함께 설치됩니다. 슬라이드 레일은 가로 슬라이딩 장치로 설치됩니다. 횡방향 슬라이딩 장치는 수직 슬라이딩 장치와 공압식 흡입 컵 장치로 설치됩니다. 운송 메커니즘은 3차원 공간의 고정된 지점에서 이동하고 흡입 컵을 통해 유리를 흡입하며 먼저 X축을 따라 측면으로 이동한 다음 지정된 위치로 90도 뒤집은 다음 위로 이동합니다. 그리고 Y축 아래로. 설정된 위치에 도달한 후 유리를 풀고 유리 선반에 놓습니다. 전체 장치의 구조적 안정성이 매우 높아 핸들링이 크게 향상됩니다. 능률.

게시 시간: 2024년 3월 18일



