
제품
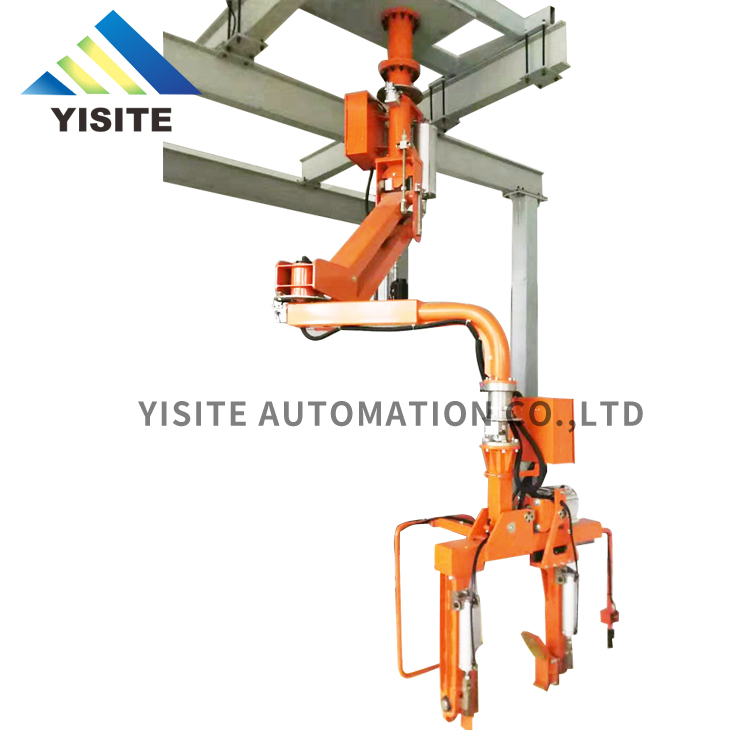


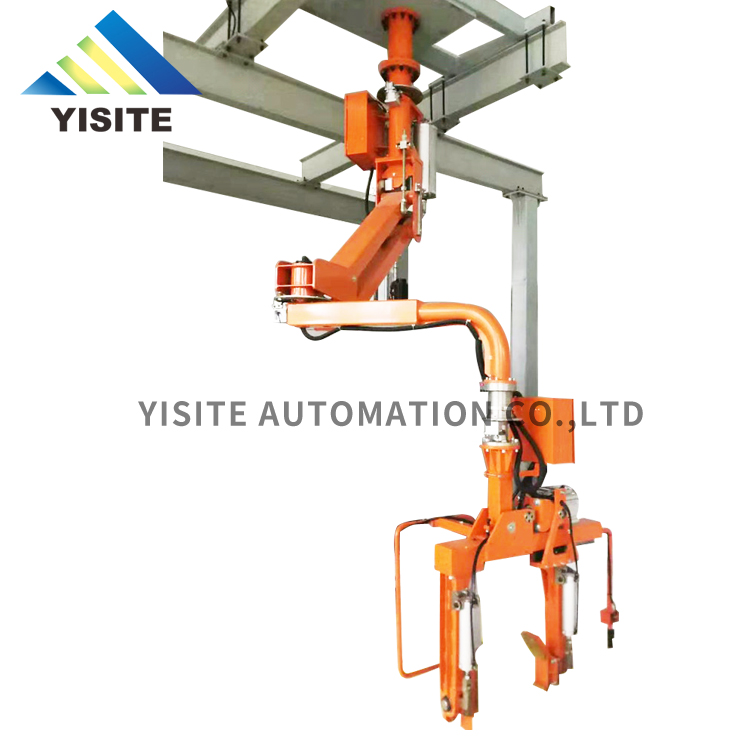
서스펜션 지브 크레인 매니퓰레이터
간단한 설명:
서스펜션 부스터 조작기는 설치 베이스, 호스트 및 강철 암 로드, 고정 장치로 구성됩니다. 메인 암은 360도 회전할 수 있고, 두 번째 암 로드는 270도 회전하여 적용 범위의 작업 범위를 달성할 수 있으며, 회전을 통해 브레이크 메커니즘. 고주파 핸들링, 포지셔닝, 부품 조립 및 기타 경우에 적합합니다.



우리에 대해

우리는 전문 맞춤형 자동화 장비 제조업체입니다. 당사의 제품에는 디팔레타이저, 픽 앤 플레이스 포장 기계, 팔레타이저, 로봇 통합 애플리케이션, 로딩 및 언로딩 조작기, 상자 성형, 상자 밀봉, 팔레트 디스펜서, 포장 기계 및 백엔드 포장 생산 라인을 위한 기타 자동화 솔루션이 포함됩니다.
우리 공장 면적은 약 3,500 평방 미터입니다. 핵심 기술팀은 기계 설계 엔지니어 2명을 포함해 기계 자동화 분야에서 평균 5~10년의 경험을 보유하고 있습니다. 프로그래밍 엔지니어 1명, 조립 작업자 8명, 애프터 디버깅 담당자 4명, 기타 작업자 10명
우리의 원칙은 “고객 우선, 품질 우선, 평판 우선”이며, 항상 고객이 “생산 능력을 늘리고, 비용을 절감하고, 품질을 향상시킬 수 있도록 돕습니다”. 우리는 기계 자동화 업계의 최고의 공급업체가 되기 위해 노력하고 있습니다.
제품특성
흡입 컵 또는 매니퓰레이터의 끝을 감지하고 실린더 내 가스 압력의 균형을 유지함으로써 기계 암의 부하를 자동으로 식별하고 공압 논리 제어 회로를 통해 실린더 내 공기 압력을 자동으로 조정할 수 있습니다. 자동 균형의 목적. 작동 시 무거운 물체는 공중에 매달려 있는 것과 같으므로 제품 도킹의 충돌을 피할 수 있습니다. 기계 팔의 작업 범위 내에서 작업자는 쉽게 뒤로, 왼쪽, 아래로 이동할 수 있습니다. 위치, 사람 자체가 쉽게 작동할 수 있습니다. 동시에 공압 회로에는 우발적인 물체 손실 방지 및 압력 손실 보호와 같은 체인 보호 기능도 있습니다.

서스펜션 동력 조작기의 작동 원리 및 모드:
흡입 컵 또는 매니퓰레이터의 끝을 감지하고 실린더 내 가스 압력의 균형을 유지함으로써 기계 암의 부하를 자동으로 식별하고 공압 논리 제어 회로를 통해 실린더 내 공기 압력을 자동으로 조정할 수 있습니다. 자동 균형의 목적. 작업할 때 무거운 물체는 공중에 매달려 있는 것과 같아서 제품 도킹의 충돌을 피할 수 있습니다. 기계 팔의 작업 범위 내에서 작업자는 쉽게 뒤로, 왼쪽, 아래로 원하는 위치로 이동할 수 있습니다. , 사람 자체가 쉽게 조작할 수 있습니다. 동시에 공압 회로에는 우발적인 물체 손실 방지, 압력 손실 보호 등 체인 보호 기능도 있습니다.
특징
최대 페이로드. 900kg
최대 행동 반경: 4500mm
수직 여행: 0,5m/분
제어 시스템: 2200mm
제어 시스템: 공기 완전 공압식
공급: 압축 공기(40 µm), 그리스가 포함되어 있지 않음
작동 압력: 0.7 ¼ 0.8Mpa
작동 온도: +0° ~ +45°C
소음:공기 소비: 100 Nl ¼ 400 N/사이클
회전: 기둥축과 고정축 360° 연속회전, 중간축 300° 연속회전







